


Sebuah kapal laut yang mengambang di permukaan air yang bergelombang akan bergerak (bergeser dan bergoyang) sesuai dengan fungsi arah transfernya dan sifat-sifat gelombangnya yang lewat. Gerakan kapal didefinisikan dan diukur dalam enam derajat kebebasan, yang semuanya angular (berputar) dan linier. Secara matematis digabungkan untuk memberikan tiga percepatan linier (x, y dan z) yang biasa digunakan dalam perhitungan desain.
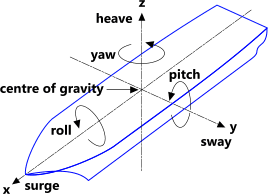
Penting untuk mengetahui berapa banyak dan seberapa cepat kapal akan bergerak karena kecepatan dan percepatan yang dihasilkan di mana saja dalam strukturnya (misalnya titik ‘Center of Gravity’ Gambar diatas) akan mempengaruhi kondisi pemuatan yang ada, komponen struktural kapal, peralatan penanganan dan pengencang (seafastening) yang harus dirancang.
Lembaga sertifikasi paling otoritatif di seluruh dunia, seperti DnV, Lloyds dan ABS, telah mengumpulkan data historis yang memadai dan mempekerjakan insinyur insiyur hebat nan berpengalaman guna dapat menerapkan faktor beban yang sesuai yang mengakomodasi sebagian besar kondisi yang diharapkan di lautan. Namun, akan menjadi tidak ekonomis dan tidak praktis untuk memproduksi peralatan yang cocok untuk digunakan dalam operasi lepas pantai seperti instalasi ladang minyak, penangkapan ikan, konstruksi, dan sebagainya menggunakan aturan ini.
Hal ini dikarenakan operasi lepas pantai hampir selalu dilakukan selama periode laut ringan dan dalam jendela periode cuaca yang diketahui.
Oleh karena itu, akselerasi kapal yang lebih akurat untuk kondisi ini biasanya lebih disukai untuk mengoptimalkan peralatan operasi sehubungan dengan biaya dan ukurannya. Teori klasik jauh lebih tepat untuk aplikasi semacam itu mengingat peningkatan prediktabilitas keadaan laut ringan.
DNV, Volume 1, Pt. 3, Ch. 1, Sec. 4
Aturan DnV untuk kapal tidak jauh berbeda dari yang dikeluarkan oleh Lloyds dan ABS dalam hal filosofi dan metode. Filosofi di balik gerakan kapal yang dihitung menggunakan aturan DNV adalah bahwa DNV telah menerapkan faktor-faktor pada persamaan-persamaan standar yang menghasilkan percepatan mirip/sesuai dengan kondisi yang diharapkan dalam perjalanan sesuai dengan pengetahuan dan pengalaman mereka yang luas.
203 – A common acceleration parameter
(1) 
(2) 
(3) 
(4) ![\begin{equation*} $C_W = 10.75 - \left[ \frac{300 - L}{100} \right]^{\frac{3}{2}}$ \end{equation*}](https://www.alvinburhani.net/wp-content/ql-cache/quicklatex.com-94d904f266efd53ef7b327d05b7886fd_l3.png "Rendered by QuickLaTeX.com")
B300 – Surge, sway/yaw and heave accelerations
Formula untuk surge acceleration (ax):
(5) 
Untuk gabungan gerakan sway/yaw acceleration (ay):
(6) 
Untuk heave acceleration (az):
(7) 
B400 – Roll motion and acceleration
Untuk roll angle (single amplitude) menggunakan persamaan:
(8) 
Dimana:
- c = (1.25 – 0.025 TR) k
- k = 1.2 untuk kapal tanpa sirip bilge keel, dan 1 untuk kapal dengan sirip bilge keel
Untuk TR atau periode Roll:
(9) 
Dimana:
- kr = roll radius giration dalam meter
- GM = tinggi metacentrik dalam meter
Nilai kr dan GM yang digunakan harus memberikan nilai TR minimum yang realistis untuk beban yang dipertimbangkan. Jika kr dan GM belum dihitung untuk kondisi tersebut, perkiraan nilai desain berikut dapat digunakan menggunakan:
- kr = 0,39 B untuk kapal dengan distribusi massa melintang merata, 0,35 B untuk kapal tanker, dan 0,25 B untuk kapal breakbulk yang memuat bijih di antara sekat memanjang.
- GM = 0,07B secara umum, 0,12 B untuk kapal tanker dan kapal curah. ,05 B untuk kapal kontainer dengan B < 32,2 m, 0,08 B untuk kapal kontainer dengan B > 40,0 m dengan interpolasi untuk B di antaranya.
Percepatan gulungan tangensial (tangential roll acceleration) secara umum menggunakan persamaan:
(10) 
Dimana:
- RR = (h – z)
- RR = jarak dalam m dari pusat massa ke sumbu rotasi.
- h = letak tinggi CoG cargo
Sumbu putaran rotasi dapat diambil pada ketinggian z m di atas garis dasar (baseline):
(11) ![\begin{equation*} $z = \text{terkecil dari }\left[ \frac{D}{4} + \frac{T}{2}\right] \text{dan}\left[ \frac{D}{2} \right]$ \end{equation*}](https://www.alvinburhani.net/wp-content/ql-cache/quicklatex.com-70520641e86c9782ea24acc0455a40fd_l3.png "Rendered by QuickLaTeX.com")
B500 – Pitch motion and acceleration
Persamaan untuk Pitch Angle (θ):
(12) 
Periode Pitch (TP):
(13) 
Tangential Pitch Acceleration (ap):
(14) ![\begin{equation*} $a_p = \theta\left[ \frac{2\pi}{T_P} \right]^{2}R_P $ \end{equation*}](https://www.alvinburhani.net/wp-content/ql-cache/quicklatex.com-c2264aff839bb36ccdef57285d35a77f_l3.png "Rendered by QuickLaTeX.com")
RP adalah jarak dalam m dari pusat massa ke sumbu rotasi. Sumbu pitch rotasi dapat diambil pada penampang 0,45 L dari A.P. z meter di atas garis dasar.
Jika TP seperti dalam persamaan 13 maka bisa menggunakan persamaan:
(15) 
B600 – Combined vertical acceleration
Biasanya percepatan vertikal gabungan (tidak termasuk percepatan gravitasi) dapat diperkirakan dengan:
(16) 
Dimana nialai kv = 1,3 untuk cargo berada buritan A.P. Nilai 0,7 cargo berada diantara 0,3L dan 0,6L dari A.P. dan nilai 1,5 jika berada di depan F.P.
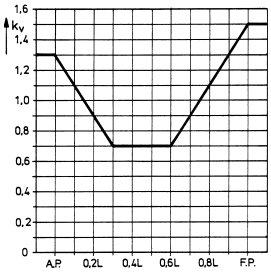
Jika untuk tujuan desain maka nilai konstan av yang diingankan berada dalam area muatan, maka nilai tersebut sama dengan 85% dari nilai av maksimum dalam area yang sama dapat digunakan.
Untuk evaluasi beban terpusat, percepatan sepanjang sumbu vertikal kapal harus dianggap sebagai efek gabungan dari heave, pitch dan roll yang dihitung sesuai indikasi 100 dalam DNV Rules 2016:
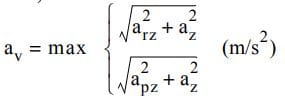
dimana:
- az = seperti pada persamaan (7)
- arz = komponen vertikal percepatan roll pada persamaan (10)
- apz = komponen vertikal percepatan pitch pada persamaan (15)
arz dan apz sama dengan ar dan ap masing-masing menggunakan proyeksi horizontal RR dan RP.
B700 – Combined transverse acceleration
Percepatan sepanjang sumbu transversal kapal diberikan sebagai efek gabungan dari goyangan (sway)/yaw dan roll dihitung dengan persamaan:
(17) 
Percepatan sepanjang sumbu longitudinal kapal diberikan sebagai efek gabungan dari lonjakan (surge) dan pitch dihitung dengan persamaan:
(18) 
Semoga bermanfaat dan dapat digunakan dikemudian hari.




apakah bisa digunakan untuk menghitung / mengestimasi motion acceleration dari sebuah cargo (misalnya Barge Mounted Power Plant) diatas sebuah Semi-Submersible Vessel?
[…] solusinya adalah merujuk ke DNV, Volume 1, Pt. 3, Ch. 1, Sec. 4, misalnya dengan data ship’s particular dengan perincian sebagai […]